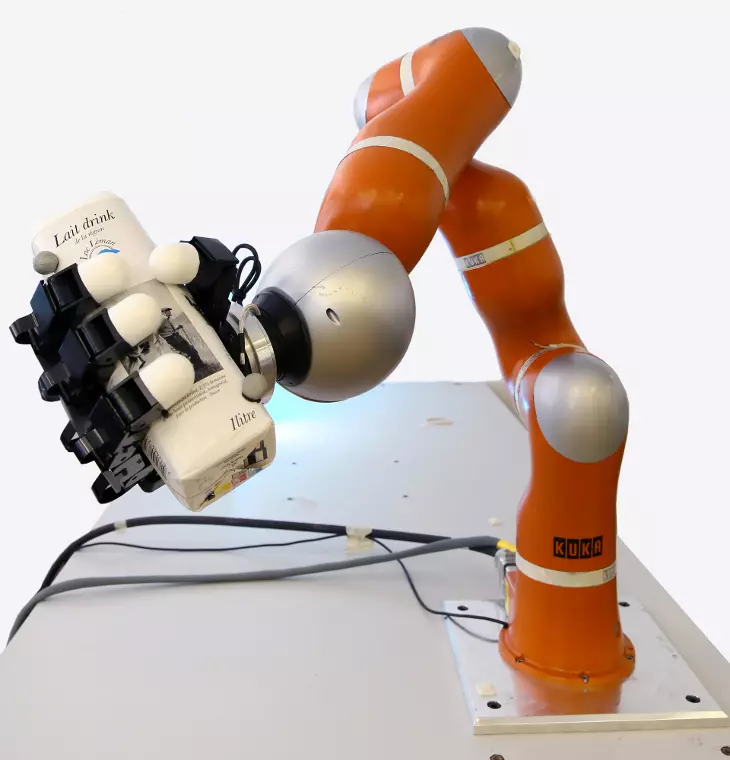
Rendkívüli reakcióidővel bíró robotkart építettek a svájci EPFL kutatói: a szerkezet a legkülönbözőbb formájú és pályájú tárgyak megragadására is alkalmas, és kevesebb mint 2 ezredmásodperc alatt reagál a kihívásokra. A négyujjas robotkar nagyjából másfél méter hosszú, és három ízületből, illetve egy meglehetősen bonyolult felépítésű kézből áll össze. A szakértők kifejezetten gyorsan mozgó, változatos alakú tárgyak elkapására fejlesztették ki.
Ahogy Aude Billard, a robotkart létrehozó kutatólabor vezetője elmondta, ahogy a robotok egyre nagyobb szerepet töltenek be a mindennapok során, megnőtt az igény arra is, hogy a váratlan helyzetekkel is képesek legyenek megbirkózni. Olyan gépezetekre van szükség, amelyek pillanatok alatt felmérik a szituációt, és képesek gyors döntéseket hozni. A most elkészült robotkar ezen törekvések részeként épült meg. Különlegessége, hogy képes megjósolni a mozgó tárgy pályáját és forgását, és mindezek alapján az objektum haladásával ellentétes irányú mozdulatot tud generálni, így el tudja kapni az objektumot.
A robotkar első alkalmazási területe az űr lehet, a fejlesztők ugyanis szoros együttműködésben dolgoznak a svájci űrügynökség munkatársaival. A szerkezet a Clean-mE nevű projekt részeként kerülhet először bevetésre, amelynek célja a Föld körül keringő űrszemét begyűjtése, szelektálása és a használhatatlan darabok megsemmisítése lenne. Mivel ezen kisebb-nagyobb alkatrészek, kiégett rakétafokozatok és kiszuperált műholdak pályájáról sokszor csak nagyon töredékes információkkal rendelkeznek a szakértők, a befogást végző rendszernek olyannak kell lennie, amely alkalmazkodni tud a tényleges körülményekhez, és helyben képes kiszámolni az adott objektum aktuális pályáját.
Billard elmondása szerint a mai, előre beprogramozott gépek nem alkalmasak az ilyen feladatokra, hiszen nem tudnak kellő gyorsasággal adaptálódni, ha változnak a körülmények. Mire egy hagyományos rendszer újraszámolja a közeledő tárgy pályáját, azt már lehetetlen elkapni. A robotkar rendszere éppen ezért másfajta: képes a tanulásra, ráadásul az emberhez nagyon hasonlóan sajátítja el az ismereteket. A fejlesztők nem adnak konkrét utasításokat az adott helyzetek megoldásához, hanem utánzás, próbálkozás és hibázás révén hagyják tanulni a rendszert. A gyakorlatban ez többek közt abból áll, hogy manuálisan irányítják a kart egy-egy célpont elkapása közben, majd ezt addig ismételgetik, amíg a rendszer magától is képessé válik a feladat végrehajtására.
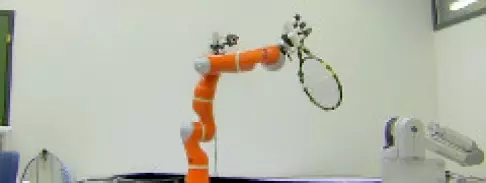
A kart a tesztek során egy labda, egy üres és egy félig teli flakon, egy kalapács és egy teniszütő elkapására tanították meg. Ezen tárgyak érdekessége, hogy nagyon eltérően viselkednek a levegőben, illetve jelentősen másképp kell megragadni őket. A kalapács esetében például a fogási pont viszonylag távol esik a tárgy tömegközéppontjától, a félig teli flakon tömegközéppontja pedig folyamatosan mozog, még nagyobb kihívást jelentve a rendszer számára.
A tanulás első fázisában a tárgyakat a robot irányába hajigálták, amely egy sor kamera segítségével elemezte azok pályáját és levegőben való viselkedését. A rendszer által kreált modelleket a kutatók egyenletekké fordították le, amelyek betáplálásával lehetővé vált, hogy a robotkar az érkező tárgynak megfelelően pozícionálja magát. A rendszer működés közben folyamatosan ellenőrzi az objektum pályáját, és finomhangolja saját mozdulatait, és ahogy a mellékelt felvételen is látható, nem csinálja rosszul, amit tesz.
