1. oldal
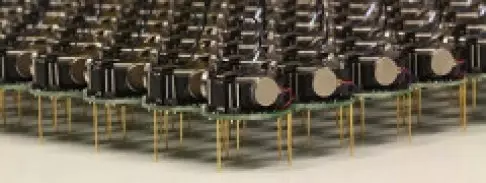
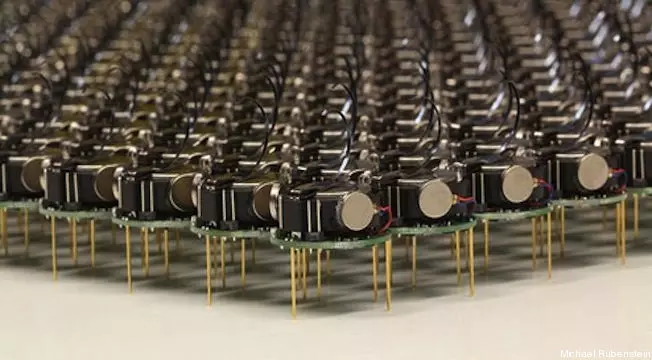
A harvardi Wyss Intézet egyik laborjában a világ legnagyobb robotraja különféle alakzatokat hoz létre magából. A néhány centiméteres Kilobotokból 1024 darab létezik – innen a nevük −, amelyek a legkülönbözőbb kétdimenziós formákba képesek összeállni egy betűtől a csavarhúzóig. Az aprócska szerkentyűk lassúak, mozgásuk pedig kifejezetten komikus, ugyanakkor teljesen autonóm módon működnek. Vagyis ha „megtanultak” egy adott formát, azt bármikor képesek egymással együttműködve újraalkotni.
A Kilobotok Mike Rubenstein, Alejandro Cornejo és Radhika Nagpal fejlesztései, akik a természetes rajokból merítettek ötletet. Az élővilágban a viszonylag egyszerű, korlátozott képességű egységek vagy egyedek is rendkívül komplex dolgokat tudnak együttesen létrehozni. Több ezer tűzhangya például élő hidakat, tutajokat vagy építményeket képes alkotni. Az emberi agyat önmagukban nem sokra képes idegsejtek milliárdjai építik fel. Sejtek billiói pedig együttesen egyaránt képesek lehetnek egy fa vagy egy dinoszaurusz felépítéséhez.
A szakértők évek óta próbálkoznak mesterséges rajok létrehozásával, a legtöbb ilyen kísérlet azonban rendkívül drága és komplikált, még akkor is, ha csak néhány tucat robotot tartalmaz. A Kilobotok ezzel szemben egyszerűek, olcsók, és sokkal több van belőlük, mint bármely másik mesterséges rajban. Bár háromdimenziós alakzatok formálására egyelőre még nem képesek, eredményeik így is lenyűgözőek.
„Azon túl, hogy a világ legnépesebb robotraját alkotják, kitűnő tesztalanyok mindenféle kollektív viselkedést generáló algoritmus kipróbálására is” – mondja Roderich Gross, a Sheffieldi Egyetem kutatója, aki saját kísérleteihez már meg is rendelt 900 darab Kilobotot. „Lenyűgöző projekt” – teszi hozzá Iain Couzin, a Princeton kollektív állati viselkedést tanulmányozó szakembere. „A Kilobotok egy olyan jövőbe engednek bepillantást, amelyben a hasonló mesterséges rajok különféle struktúrákat lesznek képesek alkotni, amikor erre szükség van, például katasztrófahelyzetekben zajló mentőakciók során. Vagy éppen a testen belül teszik ezt, új módszereket vetve be a betegségek detektálására és kezelésére.”
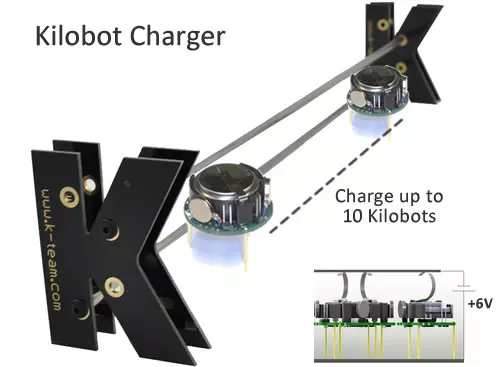
További szempont volt, hogy az egyes egységek olcsók legyenek, hiszen ezer darab komplikáltabb robot felszerelése anyagi csődbe kergette volna a vállalkozást. Végül egyszerű rezgőmotorokkal oldották meg a mozgás problematikáját. Ez asztalra letett, rezgő mobiltelefon is „elmászik”, és így mozognak a piciny robotok is, amelyek mindegyike két motorral van ellátva. Ha csak az egyik rezeg, a robot fordul, ha mindkettő működésbe lép, akkor pedig egyenesen megy − legalábbis nagyjából tartja az irányt.
A költséghatékonyság érdekében a pozíció bemérését lehetővé tevő szenzorokról is le kellett mondani. Így aztán a robotok nem tudják, hogy hol vannak, és azt sem, hogy egyenesen mennek-e. Relatív helyzetük meghatározásához infravörös nyalábokat használnak: ezeket a felszín felé lövik ki, és képesek észlelni társaik hasonló jeleit is. A felszínről visszatükröződő infravörös fények intenzitása alapján megállapítják, hogy mennyire vannak messze társaiktól.
2. oldal
Ezek a lassú, szinte teljesen „vak” robotocskák egyenként 20 dollárból előállíthatók, kezdetlegességüknek ugyanakkor megvannak a maga hátrányai. „A robotok végül még annál is egyszerűbbek lettek, mint vártuk” – mondja Rubenstein. „Zajosan és pontatlanul mérik be a távolságokat, időnként akkor sem mozdulnak, ha utasítjuk őket, mivel nem tudják, hogy nem mozognak."
Szerencsére azonban egymást képesek segíteni. Míg egy megrekedt Kilobot önmagától nem tudja megállapítani, hogy nem mozog, tásai pozícióját, ha pontatlanul is, de képes belőni. Ha úgy véli, hogy együtt mozog a többiekkel, de azt észleli, hogy tőlük mért távolsága változik, rájön, hogy valami gond van. És ha a szomszédok egységesítik az egymás közti távolságokat, képesek az egyéni hibák kijavítására.
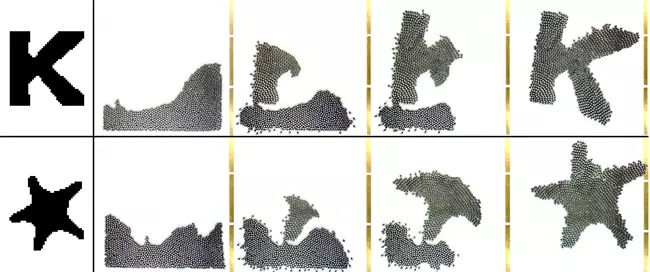
Ezen alapszabályokra támaszkodva a szakértők létrehoztak egy egyszerű programot, amelynek révén a robotok különféle alakzatokba képesek összeállni. Négy robot alkotja a tájékozódás alapját jelentő koordinátarendszer fix pontjait, és minden egyes robot megkapja a kialakítani kívánt forma képét. Ezt követően a három egyszerű viselkedésforma határozza meg az egységek haladását. Egyrészt, ahogy a mellékelt videón is látszik, mindig a tömeg szélét követik, tehát annak mentén haladnak előre. Másrészt folyamatosan érzékelik társaik, illetve a négy „magrobot” pozícióját, és ezáltal a teljes rajon belüli pozíciójukat.
Minden Kiloboton ugyanaz a program fut tehát, és a kutatók csak az elérni kívánt formát közlik, illetve kijelölik négy magrobotot, a többiek pedig ezen információkra, és saját korlátozott észlelésükre támaszkodva megtalálják helyüket. Ez nem megy túlságosan gyorsan, a felvételeken látható csillag létrehozása például durván 12 órát vesz igénybe, de ez alatt egyáltalán nincs szükség emberi közreműködésre. A végső alakzat egy kicsit mindig „csálé”, de azért felismerhető. Ebben egy kicsit hasonlítanak a természetes rajokra, hiszen a tűzhangyáknak sincs tényleges elképzelésük arról, hogyan néz ki egy híd vagy egy tutaj, de szomszédaikkal együttműködve azért képesek létrehozni egy funkcióképes struktúrát.
A szakértők évek óta eredményesen hoznak létre a rajok kollektív viselkedését szimuláló programokat. A való életben azonban olyan akadályokkal is meg kell küzdeni, mint a fizika szabályai, a jelátviteli zajok vagy a makrancoskodó áramkörök. Az elektromos szerkezetek időnként hajlamosak felmondani a szolgálatot, a robotrajjal azonban meglepően hatékonyan kiküszöbölhetők a kisebb hibák. A kutatóknak már jó néhány bedöglött motorral, megrekedt robottal, ütközéssel és közlekedési dugóval meg kellett küzdeniük. „Minél többször próbálkozunk, annál nagyobb a valószínűsége, hogy egy eddig nem várt probléma bukkan fel” –mondja Rubenstein. „Ez a gond azzal, ha több mint ezer robottal dolgozik az ember: a ritkának számító meghibásodások is meglepően gyakran bekövetkeznek.”
A következő lépés egy olyan robotraj létrehozása lenne, amelynek tagjai már egymáshoz is kapcsolódnak, és különféle struktúrákat képesek alkotni. „A fizikai összekapcsolódás mindig problémás. Ha kell egy dokkoló rész, akkor már kénytelenek vagyunk ahhoz igazítani a robot többi részét is, ami óriási befolyással lehet a teljes rendszerre” – mondja Rubenstein. Hosszabb távon pedig egy olyan robotlégió megalkotása a cél, amelynek egységei képesek észlelni környezetüket, és az aktuális körülményekhez mérten reagálnak a kihívásokra. Vagyis úgy működnek, mint a tűzhangyák, amelyeknek egy útjukat keresztező vízfolyás láttán nincs szükségük arra, hogy beléjük táplálják egy híd képét, hanem maguktól is tudják, hogy ezen valamilyen módon át kell kelni. Az intelligencia egy egészen különleges válfajáról van szó, amellyel eddig nem sokan próbálkoztak a robotikában, mondja Rubenstein. „A természetnek ellenben nagy gyakorlata van benne.”

