A NASA szakemberei már készítik a következő robotot, amellyel újabb információkat gyűjthetnek a Marsról. A technológia fejlődésével újabbnál újabb lehetőségek nyílnak a kutatók előtt, valamint fejlettebb kamerákat és érzékelőket is szerelhetnek az eszközre, azaz sokkal pontosabb képet alkothatnak arról, milyen körülmények uralkodnak a Marson. Ez később egy esetleges marsi kolónia létrehozásában is segíthet, no de ne ugorjunk ennyire előre.
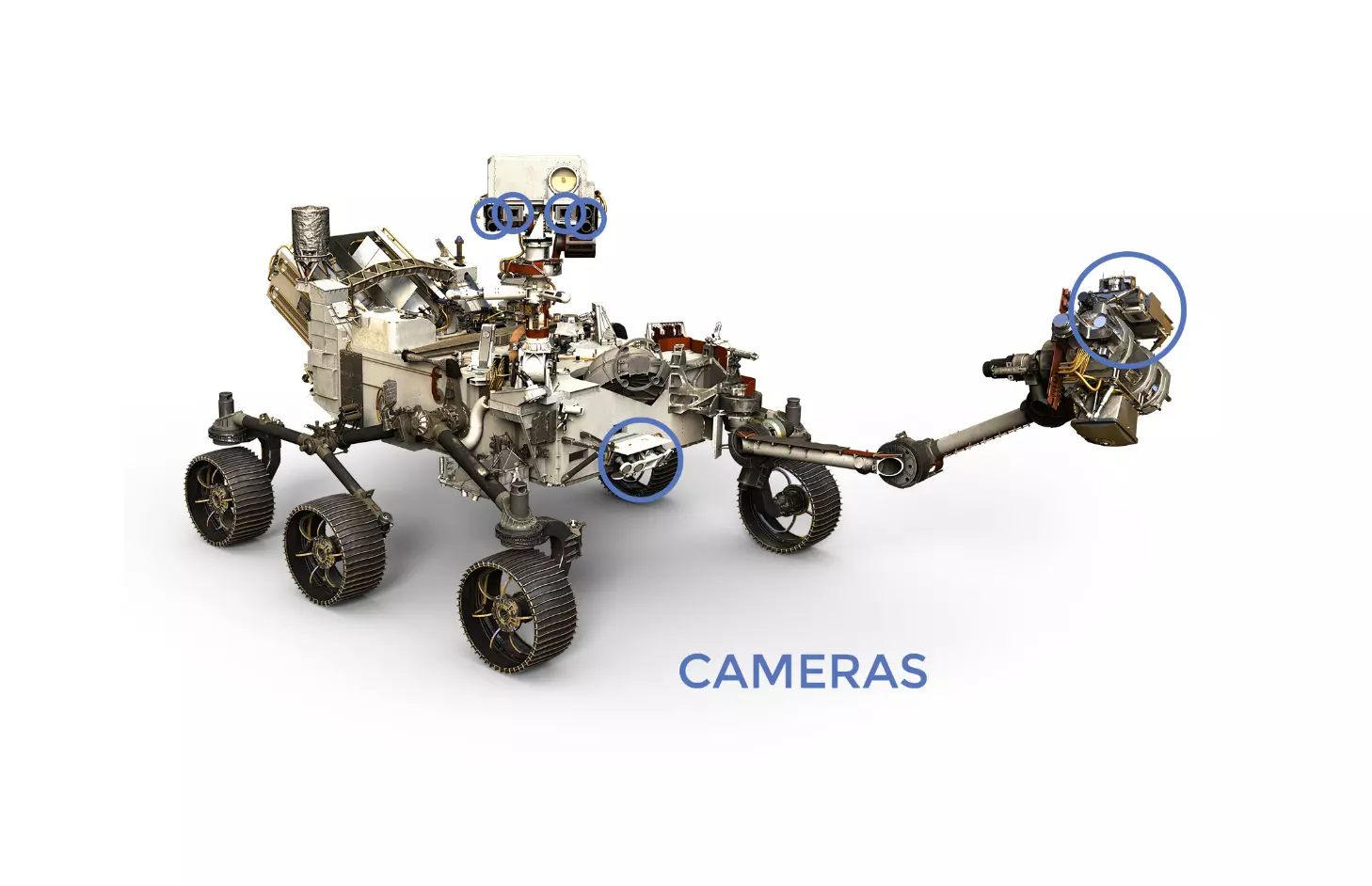
Jelenleg a Curiosity pásztázza a Mars felszínét, értékes képeit és méréseit pedig kutatókból és mérnökökből álló csapat vizsgálja. Az aktuális modell 17 kamerával rendelkezik, de utódja, a 2020 folyamán érkező 2020 Mars rover még ennél is több képérzékelő lapkát állíthat csatasorba: nem kevesebb, mint 23 kamera lesz rajta, amelyek között színesek is lesznek. Ez komoly előrelépés, ha a korábbi roverek történetét nézzük. Az elsőként a Marsra küldött Sojumer még három kamerával dolgozott, az 1997-ben landolt Mars Pathfinder pedig már öt kamerát állíthatott a tudomány szolgálatába.

A Mars 2020 az első olyan rover lesz, amely azt is képes lesz rögzíteni, milyen az, amikor az ereszkedő kapszula ejtőernyője kinyílik, de az ereszkedés folyamán, illetve az atmoszférába érve is készít majd képeket. A Land Vision System Camera segítségével a landolás folyamata is precízebbé válik, hiszen a táj elemzésével hatékonyabban közelítheti meg az egység az optimális helyszínt. A leszállás különböző folyamatait összesen hét kamera követi majd, a rover közlekedésében pedig szintén több kamera és érzékelő segít.

Az Enhanced Engineering Camera nevű egységek a Curiosity fedélzetén elhelyezett példányokhoz képest szélesebb látószöggel és nagyobb felbontással rendelkeznek majd, a tájat pedig színesben látják. Ezek nagy segítséget nyújtanak a navigációs útvonalak megtervezésében és a veszélyes területek elkerülésében, hiszen a korábbi kamerák még fekete-fehérben dolgoztak, 1 megapixeles felbontásban, az új megoldások azonban már 20 megapixeles felbontással, színesben látják a világot. Ezek közé a kamerák közé tartozik a navigációt segítő NavCam, a veszélyt felismerő HazCam, valamint a mintákat figyelő CacheCam is, amiről mindjárt szó ejtünk. A rover házán belülre kerülő kő- és egyéb mintákat az említett CacheCam nevű kamera figyeli további információkat szolgáltatva, a marsi eget pedig a SkyCam fogja pásztázni, hogy segítsen a kutatóknak az atmoszféra tulajdonságainak további vizsgálatában.
A rover önálló közlekedését két sztereoszkópikus kameratömb segíti (NavCam), amelyeknek köszönhetően a földi személyzet irányítása nélkül is képes közlekedni, illetve megfelelő döntéseket hozni. Ezek a kamerák már fekete-fehérben működnek és a rover középső oszlopának tetején foglalnak helyet. Segítségükkel 25 méteres távolságból akár egy golflabdányi tárgy is felismerhető. Ezekkel és a HazCam kamerákkal a földi irányítás parancsát követve önállóan közelíthet meg egy adott területet a rover, a navigációhoz pedig saját döntéseit használja fel, nincs szüksége külső kommunikációra.

Rendelkezésre áll még egy Mastcam-Z kamera is, ami a Curiosity MASTCAM egységének alaposan továbbfejlesztett változata, 3:1 zoom lencsével megtámogatva. A Mastcam-Z egyébként egy 3D-s kamera, ami elsősorban a geológiai adottságok feltérképezéséhez, valamint a potenciális minták távolról történő megvizsgálásához jöhet jól. A SuperCam Remote Micro-Imager (RMI) egység a legnagyobb felbontású távolról vezérelhető képalkotó megoldás lesz, ráadásul színesben dolgozik, ami a Curiosity ChemCam-hez képest komoly előrelépés. Ez a kamera 7 méteres távolságból képes 1 milliméteres lézersugarat lőni az adott sziklára, a keletkező gőzt elemezve pedig megállapítja, milyen összetételű lehet az adott kőzet – ehhez a kamera mellett spektrométert is használ.
Hasonlóan fejlett lesz a PIXL nevű egység, ami röntgensugarakkal érzékeli a kőzetek és a különböző minták kémiai összetételét, a vizsgált területről pedig a Micro-Context Camera készít képeket, hogy a kutatók könnyebben le tudják vonni a megfelelő következtetéseket.

A mozgatható karra szerelt eszközök a WATSON és a SHERLOCK nevű egységek is megtalálhatóak. A WATSON az adott területről egy nagyméretű képet készít, hogy kontextusba helyett azt, a SHERLOCK pedig a részletekre koncentrál az egyes ásványok esetében. A WATSON kamera forgatható, a rover elején pedig egy méretskálát is elhelyeztek hozzá, hogy könnyedén lehessen kalibrálni. A kamerával maga a rover is ellenőrizhető, de a MOXIE névre hallgató oxigén előállítási kísérletben is segít, ugyanis monitorozza, mennyi por gyülemlik fel a beszívott marsi levegőben, miközben a rendszer oxigént von ki belőle.

Noha a nagyfelbontású, színesben dolgozó kamerák rengeteg előnyt kínálnak, a nagyobb méretű képek hatékony továbbítása gondot okoz, hiszen a Föld és a Mars közötti telekommunikációs kapcsolat erősen limitált. Ezt a Spirit és az Opportunity esetében a képek tömörítésével oldották meg, a feladatot pedig fedélzeti számítógép végezte. A Curiosity esetében már a kamerába integrált elektronika tömörítette a képeket, a Mars 2020 egység pedig még okosabb kamerákat alkalmaz, amelyek még jobban tudják tömöríteni a tartalmakat. A limitált adatkapcsolat tulajdonképpen akadály is: a kamerák sokkal-sokkal több és jobb képet tudnának küldeni, ha nagyobb sávszélességű adatkapcsolat állna rendelkezésre.
Az új eszköz 2020-ban kezdi meg pályafutását.
