Héthónapos korára az emberi gyerekek többsége megtanulja, hogy a tárgyak akkor is léteznek, ha nem látják azokat. Vagyis ha az egyik játékot a szeme láttára betesszük egy takaró alá, az ennyi idős gyerek tudni fogja, hogy a tárgy ott van, és csak be kell nyúlnia a takaró alá, hogy visszaszerezze. De ugyanez igaz arra is, ha nem látta, hova került az objektum, akkor is el tudja képzelni annak képét, tudja, hogy létezik, és keresni fogja. Az úgynevezett kognitív tárgypermanencia kialakulása egy fontos fejlődési állomás, amely kulcsszerepet játszik a valósággal való viszonyunk formálódásában.
Az önvezető autóknál ugyanakkor nem működik a tárgypermanencia, ami egyre nyilvánvalóbb probléma. Az autonóm járművek kétségkívül egyre jobbak, de a világgal kapcsolatos percepciójuk meg sem közelíti az emberét.
Egy önvezető autó számára a látótérből átmenetileg kitakart biciklis vagy gyalogos egyszerűen megszűnik létezni.
Ez annak a számítástechnikai irányvonalnak a velejárója, amelyet napjainkban – enyhén félrevezető módon – mesterséges intelligenciának neveznek. A mesterséges intelligenciák jelenleg komplex statisztikai modellek felépítése révén működnek, de a világgal való közvetlen, mélyebb kapcsolatuk, és megértésük igen korlátozott. Hogy ezt hogyan lehetne fokozni, elmélyíteni, és például lehetővé tenni esetében a tárgypermanencia működését, azt egyre többen kutatják világszerte.
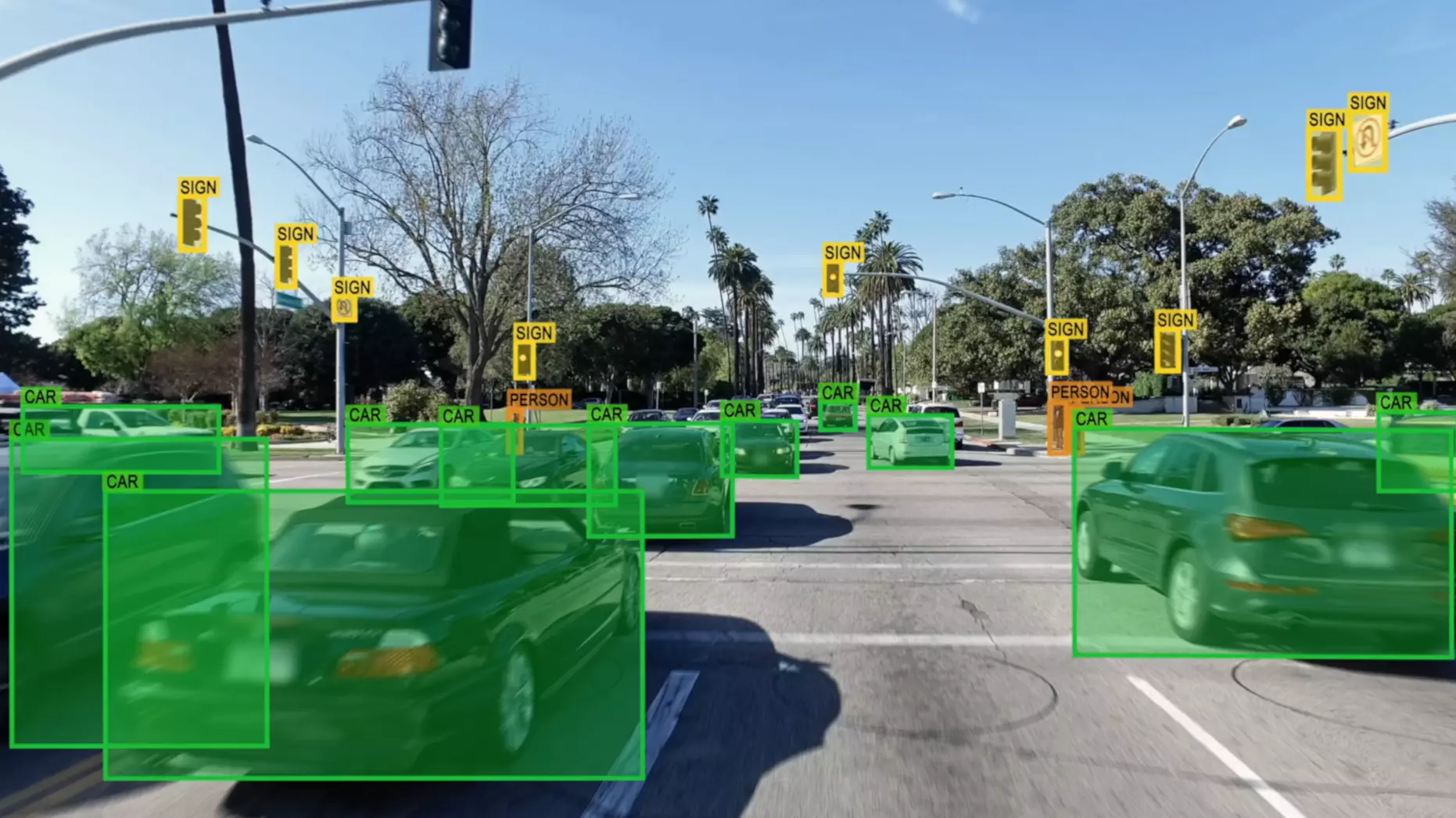
A modern mesterséges intelligencia a gépi tanulás elvén alapul. Ha egy mérnök azt akarja elérni, hogy a számítógép felismerje a megállásjelző táblát, ezt nem több ezer kódsort írva teszi, a legapróbb pixelig leírva a tábla és a jelzés lehetséges megjelenési formáit.
Ehelyett ír egy programot, amely képes magától tanulni, majd megmutatja neki több ezer stoptábla képét. Ezekből aztán a rendszer maga dolgozza ki azokat a jellemzőket, amelyek alapján a jelzés felismerhető lesz számára.
Ezeket a technikákat használják az önvezető autók forgalomban való működésének megvalósítására is. A járművek megtanulják, hogy ismerhetik fel a sávok határait, és maradhatnak azokon belül, hogyan kerülhetik el a többi járművet, hogy a piros lámpánál meg kell állni, és így tovább. Ugyanakkor egy sor dolgot nem értenek, ami az emberi sofőrök számára egyértelmű: hogy a többi jármű többsége is motorral és négy kerékkel megy, hogy ezek általában betartják a közlekedési szabályokat, a fizika törvényei pedig minden esetben érvényesek rájuk. És ahogy már említettük a tárgypermanencia sem erősségük a mesterséges intelligenciáknak.
Egy most megjelent tanulmányban Mehul Bhatt, a svédországi Orebro Egyetem kutatója, a CoDesign Lab nevű cég alapítója egy újfajta megoldási módot fejt ki. A szakértő kollégáival fogott néhány mesterséges intelligenciát, amelyek használatban vannak az önvezető járművekben, és összekötötte ezeket egy szimbolikus érvelési motornak nevezett szoftverrel.
Érvek és ellenérvek
A gépi tanulásra jellemző valószínűségi megközelítés helyett ez a szoftver alapvető fizikai koncepciókat alkalmaz az önvezető jármű szenzoraiból beérkező jelek feldolgozása során, és ezt a módosított feldolgozást továbbítja az autót irányító rendszernek.
A hozzáadott alapelvek olyan alapvető megfontolások, mint hogy a szilárd tárgyak időben folytonosan léteznek, spaciális viszonyban vannak más tárgyakkal (pl. előttük, mögöttük), és lehetnek teljesen láthatók, részben láthatók, és teljesen láthatatlanok is, például ha kitakarja őket egy másik objektum.
A módszer bevált: a tesztek során a rendszer azon autókat is nyomon tudta követni, amelyeket átmenetileg kiakart valami a látótérből, és meg tudta jósolni, hogy hol és mikor fog újra előbukkanni, szükség esetén megtéve az ütközés elkerüléséhez kellő korrekciókat is. A fejlődés nem volt nagyon látványos, a sztenderd tesztek során Bhatt érvelés motorral megtámogatott rendszere 5 százalékkal teljesített jobban a létező, használatban levő szoftvereknél, de arra jó volt a kísérlet, hogy demonstrálja a koncepció hasznosságát. Ráadásul egy másik haszna is volt: a gépi tanulási algoritmusokkal ellentétben az érvelési motor képes megindokolni, hogy mit miért tett.
Az így irányított autótól például meg lehet kérdezni, hogy miért fékezett le, és meg fogja tudni mondani, hogy egy biciklis rejtőzik az egyik furgon mögött, és mindjárt behajt a kereszteződésbe.
A gépi tanulás erre nem képes. Amellett, hogy az új koncepció jobban teljesíthet a valóságban, mint a korábbiak, a döntések megindoklásának képessége a fejlesztők, a törvényhozók és a biztosítók dolgát is megkönnyítheti, valamint az autonóm járművek társadalmi elfogadottságát is elősegítheti.
Bhatt ötletének az alapjai messzire nyúlnak: a mesterséges intelligenciák fejlesztésére irányuló korai próbálkozások során, az 1950-es években néhányan már próbálkoztak előre programozott érvelésen alapuló rendszerekkel, több-kevesebb sikerrel. Az 1990-es évek kezdetére azonban a gépi tanulás olyan szinten kezdett fejlődni az újfajta programozási módszerek, a növekvő számítási kapacitás és az egyre több adat miatt, hogy ez tűnt a kedvezőbb útnak. Napjainkban csaknem minden mesterséges intelligenciának nevezett rendszer gépi tanulással működik.
Bhatt ugyanakkor nincs egyedül azok közt, akik alternatív megoldásokkal próbálkoznak. Gary Marcus, a New York Egyetem pszichológiával és idegkutatással foglalkozó kutatója, a Robust.ai nevű mesterséges intelligenciával és robotikával foglalkozó cég vezetője egyetért azzal, hogy ideje az érvelési motorokat is bevonni a képbe.
Ahogy Marcus felidézi, évekkel ezelőtt a DeepMind mérnökei írtak egy mesterséges intelligencia algoritmust, amely gépi tanulással tanulta meg játszani a Breakout nevű számítógépes játékot, amelyben egy alul levő lapot mozgatva kell a fenti falra irányítani a labdát, és lebontani annak tégláit.
A fejlesztők semmiféle információval nem látták el a rendszert azzal kapcsolatban, hogyan célszerű játszani a játékot, vagy hogy milyen szabályszerűségek érvényesülnek. Az algoritmus ennek ellenére remekül teljesített – legalábbis ami az alapjátékot illeti. Amikor azonban egy másik fejlesztői csoport kicsit módosított a körülményeken, néhány pixellel kimozdítva az „ütőt” eredeti pályájáról, a teljesítmény gyorsan romlani kezdett.
A rendszer nem tudta általánosítani, amit a specifikus szituációkból megtanult, és az ismereteket nagyon hasonló helyzetekben sem volt képes adaptálni és alkalmazni.
Szabályok és komplexitás
Marcus szerint ez a példa kiválóan demonstrálja a gépi tanulás gyenge pontját. Mások szerint viszont a szimbolikus érvelés is hasonlóan sebezhető, és a gépi tanulásban még mindig vannak kiaknázható lehetőségek, illetve fejlődési utak. Jeff Hawke, a Wayve nevű, önvezető autókat fejlesztő londoni cég technológiai aligazgatója például
úgy segíti rendszerük tanulását, hogy az autó különböző részeit vezérlő szoftverelemeket párhuzamosan, egyszerre „trenírozza”, nem pedig külön-külön, mint mások.
A Wayve autói pedig a bemutatók során meglepően jól navigálnak London forgalmas, szűk utcáin, ami sokszor az emberi sofőröknek sem megy könnyen.
Hawke szerint a legtöbb való világbeli szituáció annyira összetett, hogy nem lehet egy maroknyi betáplált szabállyal megoldani, és ahogy mondja, az régóta ismert, hogy a szabályokkal kiegészített rendszerek sokkal nehezebben birkóznak meg a komplex problémákkal. És korlátozottságuk független attól, hogy mennyire alaposan átgondoltak és strukturáltak a szabályok.
Ha például egy ilyen rendszerben minden piros lámpánál meg kell állni, az közlekedési szempontból nem mindig fog működni. A különböző országokban eltérőek a lámpák, vannak olyan piros lámpák, amelyek nem is az autónak szólnak, és akadnak olyan közlekedési helyzetek is, amikor át kell hajtani a piroson, például mert helyet kell biztosítani egy elhaladó mentőnek.
„A gépi tanulás szépsége, hogy ezeket a tényezőket és koncepciókat automatikusan tárja fel és tanulja meg a rendszer a valós adatokból. És minél több az adat, annál intelligensebbé válik”
– mondja Hawke.
Nicholas Rhinehart, a Berkeley robotikai szakértője szintén elsősorban a gépi tanulásban látja a jövőt. Ahogy mondja, Bhatt kiválóan demonstrálta, hogy a két koncepció kombinálható, ugyanakkor erre nem biztos, hogy szükség van. A gépi tanulással fejlődő rendszerek maguk is képesek előre jelezni a várható helyezeteket, például hogy egy szomszédos autó várhatóan hol lesz pár másodperc múlva, és ezen előrejelzések alapján képesek tervezni.
Bhatt szerint viszont hiába tanítunk meg egy autónak sok-sok millió levezetett kilométernyi adatot, még így sem tudunk lefedni minden lehetséges közlekedési helyzetet. Így szerinte sok esetben egyszerűbb és hatékonyabb lenne bizonyos szabályokat a kezdettől beprogramozni.
Mindkét oldal támogatói egyetértenek abban, hogy a kérdés túlmutat az önvezető járműveken, és meghatározó lehet a mesterséges intelligencia jövője szempontjából. „Nem gondolom azt, hogy a jelenlegi a lehető legjobb megközelítés” – mondja Marcus.
„A gépi tanulás több területen hasznosnak bizonyult, például a beszédfelismerésben, de nem ez lesz a válasz a mesterséges intelligenciák fejlesztésére. Az intelligencia problémája továbbra is megoldásra vár.”
Vagyis a gépeknek még mindig van mit tanulniuk a gyerekektől.
